导读 : 本次分享的主题为自动驾驶硬件研发的挑战与展望。
主要内容包括 :
1. Pony.ai 硬件发展简介

Pony.ai 成立于 16 年 12 月,公司第一辆车是在 2017 年 Q2,拿到了美国加州的自动驾驶测试牌照,开始正式测试。可以看到我们当时用的还是 64 线激光雷达。2018 年 Q1,拿到了北京测试牌照,可以看到我们的雷达已经换成了 32c+多 camera 组合。2018 年 Q4,我们在上海 WAIC 世界人工智能大会上发布了公司第一个硬件 release 版本 Pony Alpha,可以看到整车的集成度和外观都进行了非常有针对性的设计。2019 年 Q2,与丰田合作改装 LEXUS RX450h。最后,是在 2019 年 Q4 发布的 Pony Alpha2 硬件系统,稍后将详细介绍。
2. Pony.ai 硬件团队介绍

Pony.ai 在北京、硅谷、广州都有研发中心,并且有车队,所以相应的在三地都有硬件团队提供本地化支持。三地之间的硬件团队经常会做技术共享,由于硬件研发本身有一定的本地化属性,所以我们是通过项目来分工合作的,同时,我们每周三地的工程师会进行充分的技术交流。
Pony.ai 硬件团队构成,包括:电子电气工程师、结构工程师、嵌入式工程师/FPGA 、车辆工程等等。
3. Pony Alpha2 系统介绍
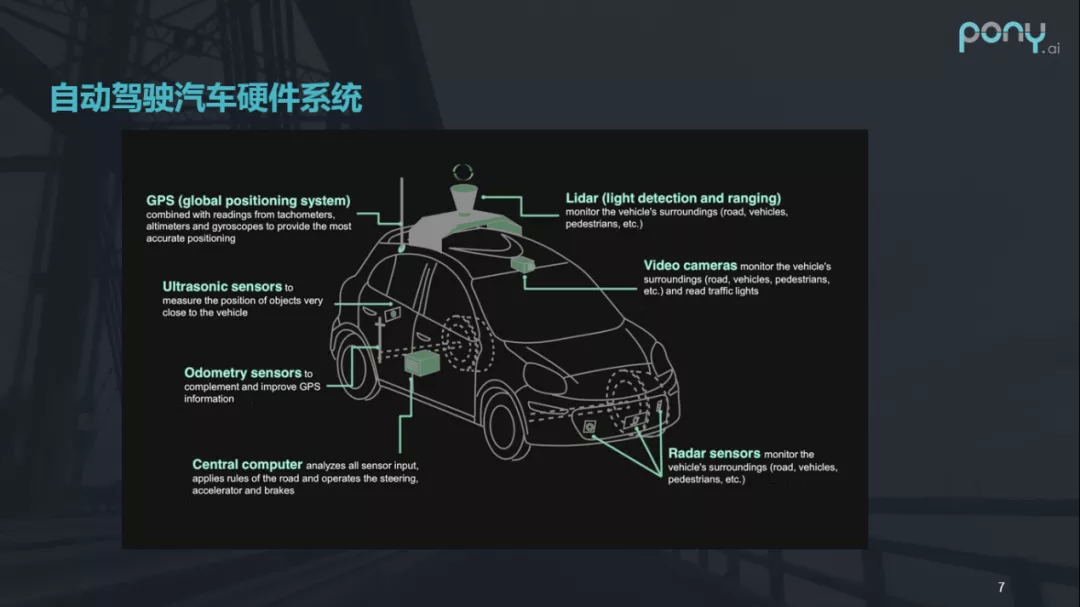
首先介绍下自动驾驶汽车硬件系统,如上图所示,主要分三个部分:
① sensor 传感器,相当于车辆的“眼睛”,包括:雷达,Camera,GPS+IMU 等。
② compute 计算单元,相当于车辆的“大脑”,主要放在后备箱。
③ vehicle 车辆本身,是最大的硬件系统,相当于车辆的“肌肉”。

这是我们在 2019 年 Q4 发布的 Pony Alpha2 硬件系统,最新的进展包括:
① 传感器配置升级:出于成本和国产化的考虑,主 lidar 使用了 Hesai64 线激光雷达。
② 传感器清洁系统:特别针对雨天,自主研发传感器清洁系统。
③ DBW 线控:过去一度被 Autonomous Stuff 垄断 目前 pony 已经具有不同车型的线控改装技术,并能够独立进行控制参数调优。
④ 线束:深入改装车辆系统,自主研发与定制的线束。
⑤ 集成度进一步提升:通过自研硬件设备,使得设备间连接线束减少,集成度和稳定性显著提高。
⑥ 后备箱空间可用:高度集成节省了空间,后备箱有大量富裕空间供 robotaxi 乘客使用放置行李。
4.自动驾驶硬件研发挑战
① 成本

硬件系统首先面临的 最大挑战 就是 成本 。我们看以看到右图是 pony alpha 系统的车顶,有 3 个激光雷达,6 个高清摄像头,还有定位模块等,传感器+定位系统成本高达几十万 RMB。所以,如果成本这么高,如何实现自动驾驶的批量生产?何时才能服务大众?
Pony 进行的尝试和探索:

② 功耗/散热

功耗和散热问题,简单理解就是 电从哪里来?热到哪里去?
Pony 内部进行的尝试和探索:
③ 快速迭代
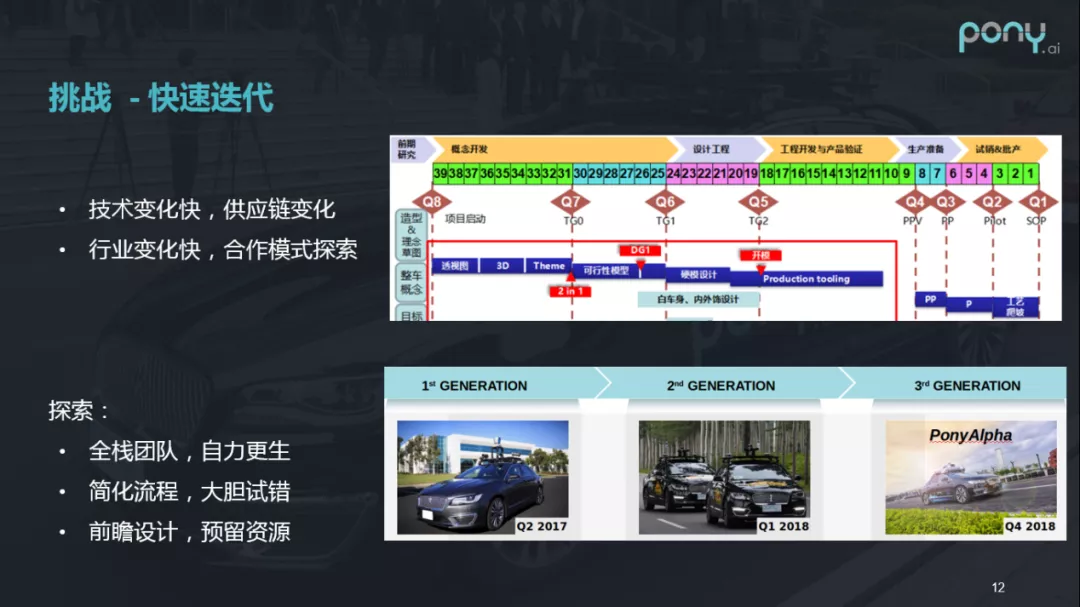
右图是典型的汽车研发流程图,一辆汽车的研发大概会经历 2 年时间。但是对于我们,从 2017 年 Q2 到 2018 年 Q4,大概 1 年半的时间内,我们已经迭代了 3 代的硬件产品。并不是我们追求快,而是技术和行业的发展趋势如此:
Pony 进行的尝试和探索:
④ 量产

目前全球汽车保有量在 10 亿以上,全球无人驾驶汽车总量无法找到数据,只能预估下,大概在万级别,所以差距还是非常大的。曾经有人统计无人驾驶带来的效率提升,粗略的估计是 95%,如果替代国内的 2 亿辆汽车,需要一千万无人驾驶车辆。所以现在离自动驾驶汽车量产还有很大的一段距离,右图来自网络,大概是前几年的照片,就很形象的解释了量产。虽然现在很多自动驾驶汽车已经过了 demo 的阶段,但是这个问题还是存在的。
Pony 进行的尝试和探索:
⑤ 复杂道路情况
最后,再介绍下复杂路况。右上角是国内典型的十字路口,目前大部分的自动驾驶公司应该还处理不了这种场景。对于 Pony,随着场景不断丰富,对无人车硬件的要求不断增多。比如传感器的配置,我们也经历了摸石头过河,循序渐进的过程。Waymo 为什么选择在凤凰城开展无人驾驶测试,相当程度上也是考虑到那里的空气干燥,常年晴天,极少雨雪。解决这些极端气候问题,需要更长期的技术迭代优化,短期内这些可能并不是最迫切的,我们也相信随着技术的发展这些难题也都会逐步得到解决。
今天的分享就到这里,谢谢大家。
作者介绍 :
李林涛,Pony.ai 北京硬件研发团队负责人
本文来自>
原文链接 :