在ArchSummit深圳2018大会上,徐雷讲师做了《自动驾驶中的计算机视觉技术》主题演讲,主要内容如下。
演讲简介 :
自动驾驶是机器学习的集大成者,有广泛的市场和应用前景。
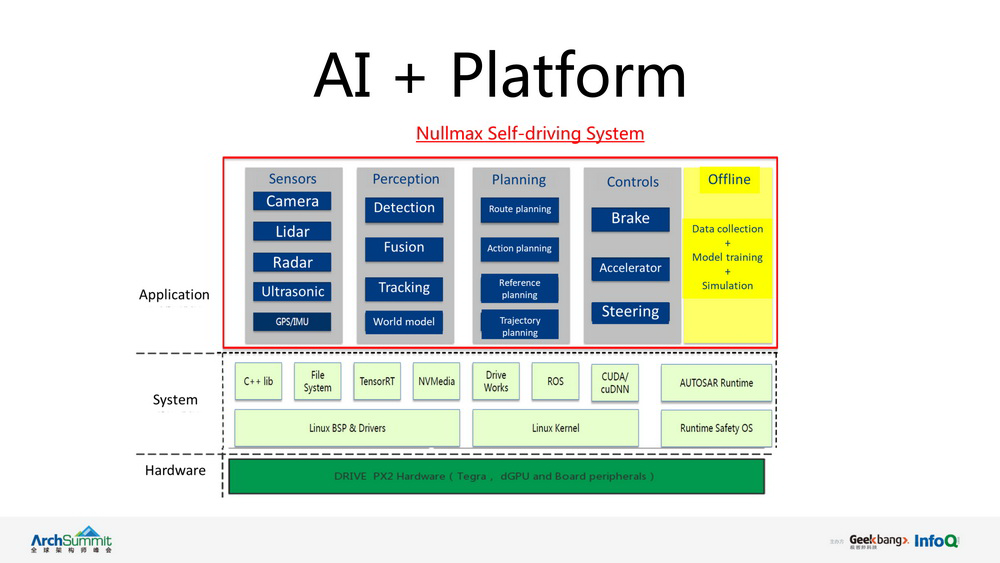
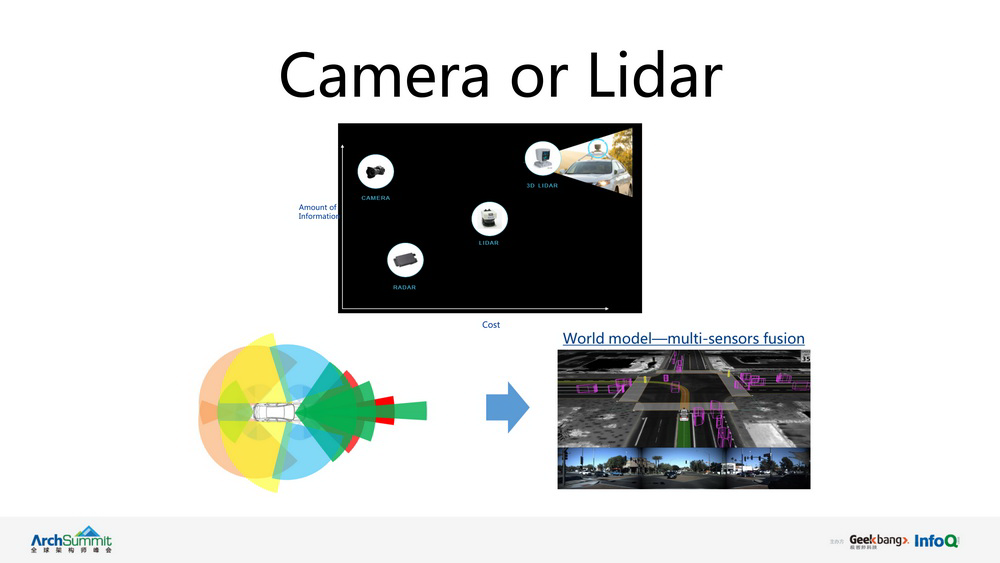
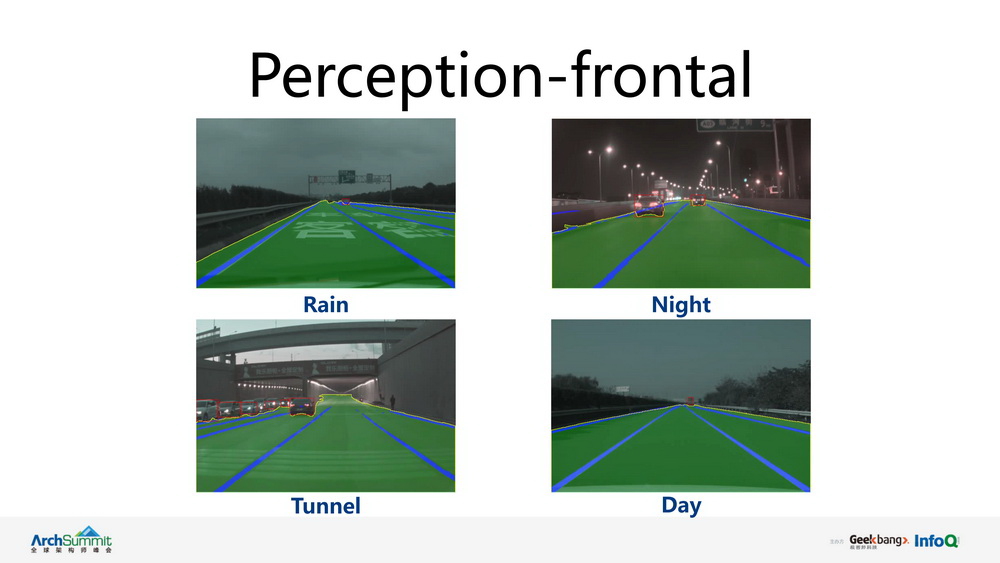
摄像头作为性价比非常高的传感器,在自动驾驶系统中起到了非常关键的作用,如何高效稳定的利用摄像头完成环境感知任务,是极具挑战的工作。通过以摄像头为主的基于计算机视觉的方案,一套低价格,高性能的自动驾驶系统可以大幅度提高用户对安全性的需求。
同时,随着机器学习的应用,尤其是卷积神经网络最近有了长足的进步,在一定程度上都促进了计算机视觉技术在自动驾驶领域的落地。此次演讲,会向听众分享计算机视觉的关键技术研究内容,并向外界展示纽劢科技在基于深度学习的障碍物检测、识别跟踪等多个领域的产品 demo。
演讲提纲
听众受益
讲师介绍 :
徐雷
纽劢科技 CEO 前 Tesla Vision 深度学习负责人
前 Tesla 计算机视觉高级工程师,Autopilot 团队核心成员,Tesla Vision 深度学习负责人,研究结果直接汇报 Elon Musk,并应用于 Tesla 量产车型 Autopilot 2.0 系统。在顶级期刊和国际知名会议发表 20 多篇论文,拥有 3 项已授权的美国专利。具有丰富的计算机视觉经验,过去曾从事于 Qualcomm Inc, Intuitive Surgical Inc, Siemens Corporate Research。
完整演讲 PPT 下载链接 :